Шаговый двигатель: принцип работы, схема, описание, характеристики jmule.ru
В современной электротехнике используется множество самых разнообразных устройств, некоторые из них предназначаются для автоматизации технологических операций. Таковым является и шаговый двигатель. Принцип работы и устройство данного прибора описаны в статье.
Что это такое?
Так называется электромеханическое устройство, служащее для передачи управляющего сигнала в механическое движение ротора. Каждое движение заканчивается фиксацией в строго заданном положении. Прибор бывает угловым или же линейным. Стоит помнить, что шаговый двигатель, принцип работы которого будет изложен ниже, является синхронным устройством.
Кстати почитать про управление шаговыми двигателями можно на сайте jmule.ru .
Системы управления с разомкнутой цепью (без обратной связи)
Чаще всего это оборудование управляется специальной электронной схемой. Питается оно только от источника переменного тока. Такие двигатели часто используются в схемах, где требуется управление частотой вращения. Это позволяет избежать необходимости использования дорогого и сложного контура обратной связи, да и защита электродвигателя становится проще (требуется только предусмотреть быстрое обесточивание).
Данный принцип работы применяют в схемах с разомкнутой связью. Следует помнить, что указанная схема (без контура обратной связи) выгодна с экономической точки зрения, но у нее есть ряд существенных ограничений.
Так, поворот ротора является достаточно нестабильным, колебательным, отчего частота вращения и прочие характеристики движения ни в коем случае не могут быть настолько же точными, каковыми они являются в двигателях постоянного тока с контуром обратной связи. Для расширения сферы применения шагового двигателя требуется изыскивать способы снижения вибрации.
Конфигурация системы
Чтобы лучше понимать устройство шагового двигателя и принцип его работы, можно рассмотреть схему функционирования прибора под его управлением, который лет 20 назад использовался для изготовления перфокарт. Для этой цели повсеместно применяли трех- и четырехфазные ШД. Сейчас мы рассмотрим схему работы первого.

Мы уже упоминали, что ротор двигателя поворачивается на определенное расстояние в ответ на каждый управляющий импульс. Значение этого поворота выражается в градусах и называется шагом. Логическая цепь включается во время получения сигнала, после чего сразу же определяет нужную для задействования фазу. После этого она отправляет свой сигнал на инвертор, отвечающий за значение тока, который используют шаговые двигатели. Характеристики этого оборудования предполагают использование различных типов управляющих схем. Как правило, последние монтируются из широко распространенных транзисторов, хотя сравнительно недавно для этой цели использовали интегральные схемы. При высоком ее выходном потенциале происходит автоматическое возбуждение нужной фазы обмотки (первой, к примеру). Если потенциал снижается, происходит автоматическое отключение данной фазы. Так реализована защита электродвигателя.
Фазы обозначают порядковыми номерами 1, 2, 3 и т.д. либо буквами А, В, С и т.д. Последний вариант используется только в случае некоторых двухфазных двигателей. Таким образом, в каждый конкретный момент времени возбуждена только одна фаза из двух, трех или четырех имеющихся (в зависимости от типа двигателя). При объяснении принципов работы такого устройства это обстоятельство упоминается постоянно, но необходимо понимать, что указанная схема вовсе не является идеальным способом управления.
Шаг и инкремент
Наиболее простым вариантом является подача одиночных импульсов от управляющей схемы. В этом случае, к примеру, двигатель за один раз поворачивает ведущую звездочку конвейера на какое-то расстояние вперед. Следует заметить, что при подаче массивного механизма вперед только на один шаг еще более усугубляется проблема вибрации, да и значительная инерция дает о себе знать.
В таких случаях куда более оправданно использовать шаговый двигатель, который может за один управляющий импульс делать несколько движений. Также не помешает использовать звездочку с более мелкими зубьями. К слову, каждое такое движение называется инкрементом.
В описываемых нами случаях инкремент равен одному и нескольким шагам соответственно. После каждого цикла двигатель на какое-то время останавливается, после чего все повторяется сначала. Это называется инкрементным движением и инкрементным управлением соответственно.
Если одно движение выполняется за несколько шагов (о чем мы говорили выше), причем колебаний ротора может и не быть. Когда движение одношаговое, колебания приходится гасить при помощи специального электронного устройства. Вообще шаговые двигатели (характеристики которых мы рассматриваем) относятся к наукоемким устройствам, для их работы требуется много сложной электронной «начинки».
Общий принцип управления
На один инкремент количество шагов больше четырех приходится в каких-то производственных линиях, конвейерах. Когда данные с запоминающего устройства (внутренняя флеш-память, жесткий диск компьютера) отправляются к контроллеру, выполняются они блок за блоком. Каждый из них содержит строго определенное количество символов (32, 48 или 64), причем в разных системах и при различных назначениях устройства эта цифра может серьезно варьироваться.
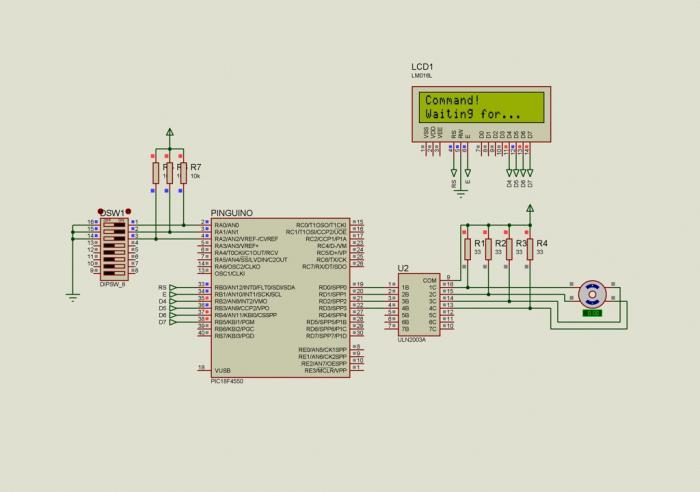
Неудивительно, что в последние годы стали распространены самоделки на основе микрокомпьютера Arduino. Шаговый двигатель в такой конструкции идеален, так как в такой связке его можно приспособить как в качестве силовой установки для игрушки, так и для довольно сложного промышленного оборудования.
Блок данных перед его использованием переносится в полупроводниковую память на контроллере, после чего движение начнется в соответствии с инструкциями, которые были записаны в первом блоке информации (перед тем как подключить электродвигатель, обязательно нужно выяснить эти характеристики).
После выполнения инструкций система начинает считывать второй массив информации. Если каждое движение состоит из множества мелких шагов, то перед основным контроллером необходимо монтировать дополнительный каскад. Чаще всего его функции выполняются входным контроллером. Он отправляет данные на второй управляющий контур с каким-то интервалом, заданным системой (Arduino). Шаговый двигатель в этом случае защищен от перегрузки запросами.
Некоторая специфика использования ШД
Мы расскажем вам о некоторых нюансах использования шаговых двигателей, а также дадим определение часто используемым в этой области терминам:
- Маленький угол шага. Как вы уже знаете, после каждого управляющего импульса ротор двигателя поворачивается на какой-то определенный градус. Чем шаг меньше, тем более высокой может быть непосредственная частота вращения. Важно знать, что шаговые двигатели вполне могут обеспечивать очень маленький шаг. Шаговым числом в этом случае называется количество оборотов за один шаг, причем это значение очень важно для инженеров. Высчитывается оно по следующей формуле:
S = 360/θS, где S – шаговое число, θ – угол шага (угол поворота).
В большинстве случаев привод шагового двигателя может выполнять 96, 128 или 132 шага за один оборот. Четырехфазные модели иногда имеют значение в 200. Редкие виды прецизионных двигателей за один только оборот могут сделать сразу 500 или 1000 шагов. Впрочем, для простых разновидностей это недостижимо, так как у них угол поворота равен 90, 45 или 15°.
- Высокая точность частоты вращения. Именно этот параметр и определяет общее качество прибора. Вы уже знаете, что работа шагового двигателя предполагает его остановку и фиксацию в определенном положении после выполнения блока данных. Разумеется, обычная механика однозначно говорит нам, что из-за инерции, силы трения и прочих факторов возможны всяческие отклонения от заданных параметров.
Борьба с нежелательными явлениями
Зазор между роторными и статорными зубцами всегда делается минимальным для увеличения жесткости фиксации. Сама точность позиционирования зависит от характеристик только лишь инвертора, так как прочие факторы на нее влияют в гораздо меньшей степени.
А сейчас необходимо рассмотреть ряд важных характеристик и понятий, таких, как максимальный статический момент, положения «мертвого» ротора, а также точность позиционирования всех этих положений. Для определения вышеперечисленных терминов существует сразу две общепринятых распространенных концепции.
Максимальный статический эффект
Как мы уже и говорили, он имеет сразу два положения:
- Удерживающий. Это максимально допустимый эффект, который теоретически может быть приложен к валу уже возбужденного шагового двигателя без возникновения движения.
- Фиксирующий. Соответственно, это также максимальный статический эффект, который теоретически может быть приложен к валу невозбужденного двигателя без возникновения последующего вращения.
Чем удерживающий момент выше, тем ниже вероятность возникновения погрешностей позиционирования, вызываемых непрогнозируемой нагрузкой (отказали конденсаторы для электродвигателей, например). Полный фиксирующий момент возможен только в тех моделях двигателей, в которых используются постоянные магниты.
«Мертвые» положения ротора
Существует сразу три положения, в которых ротор полностью останавливается:
- Положение равновесия. В нем происходит полная остановка возбужденного шагового двигателя.
- Фиксация. Также состояние, в котором останавливается ротор. Но используется это понятие только в отношении тех двигателей, у которых в конструкции имеется постоянный магнит.
- В современных моделях шаговых двигателей, которые соответствуют всем нормам экологической и энергетической безопасности, при остановке ротора полностью обесточивается и обмотка.
О точности позиционирования
Наконец, поговорим о важнейшем понятии. Речь идет о точности позиционирования. Можно догадаться, насколько оно важно при работе сложного промышленного оборудования. Различают два важнейших термина:
- Ошибка углового положения. Определяется как положительный или отрицательный уход от нормативного углового состояния, что очень часто наблюдается в случаях перехода ротора из одного положения в другое. Как правило, виновата инерция, а также плохая подгонка деталей.
- Точность позиционирования. Это максимальное значение ошибок углового положения ротора, которые возникают за весь период шагового движения.
Важно! Отыскать нормативные сведения для каждой категории шаговых двигателей можно как на официальной странице их производителей, так и из справочной документации, которая прилагается к такого рода изделиям. Как правило, значение ошибки находится в пределах от +0,08 до -0,03°. Проще говоря, точность позиционирования высчитывается в виде суммы двух этих показателей: 0,08° + 0,03° = 0,11°.
Таким образом, шаговый двигатель, принцип работы которого мы описываем, относится к высокоточному оборудованию.
Высокое отношение электромагнитного момента к моменту инерции
Как вы уже представляете, от шагового двигателя требуется максимально быстро начать движение сразу после поступления на контроллер управляющего импульса. Он должен столь же быстро остановиться, обладая высокой точностью позиционирования. Если во время движения последовательность импульсов управления прервется, двигатель перестанет работать в положении, определяемом последним импульсом.
Также следует иметь в виду, что отношение электромагнитного момента к моменту инерции ротора у ШД должно быть намного выше аналогичного показателя для обычных электромоторов.
Шаговая частота вращения и частота импульсов
Так как частота вращения у ШД фактически представляет собой количество шагов в единицу времени, вместо термина "частота вращения" в специализированной литературе нередко можно встретить определение "шаговая частота вращения". Перед тем как подключить электродвигатель, об этих нюансах нужно обязательно прочесть.
Так как у большинства шаговых двигателей эта частота равна количеству управляющих импульсов, не стоит удивляться необычному ее обозначению в технических справочниках. Точнее, для подобных моторов единицей измерения нередко является герц (Гц).
При этом важно понимать, что шаговая частота вращения реального числа оборотов ротора двигателя ни в коем случае не отражает. Специалисты считают, что нет никакой причины не использовать в описании шаговых двигателей все то же количество оборотов в минуту, которое применяется при описании технических характеристик обычных электродвигателей. Соотношение между реальной частотой вращения и ее шаговым аналогом вычисляется по следующей формуле:
n = 60f/S, где n – частота вращения, выражается в оборотах в минуту; f – шаговая частота вращения; S – число шагов.
Кстати, а как определить требуемые конденсаторы для электродвигателей? Очень просто! Достаточно только использовать вот эту формулу:
С = 66·Рном
Несложно догадаться, что под Рном понимается номинальная мощность электродвигателя в кВт.
Простейшая схема подключения двигателя EM-178
А сейчас нами будет рассмотрено простейшее подключение шагового двигателя на примере модели ЕМ-178, которая повсеместно используется в промышленных принтерах.
|
Фаза 0 |
Белый контроллер |
|
Фаза 1 |
Оранжевый |
|
Фаза 2 |
Выполняется подключение шагового двигателя к красному контроллеру |
|
Фаза 3 |
Подключается к синему разъему |
|
Общий «+» питания |
Коричневый контроллер |
Расписать работу более масштабно попросту не получится, так как существуют миллионы самых разнообразных моделей, характеристики которых имеют существенные различия.
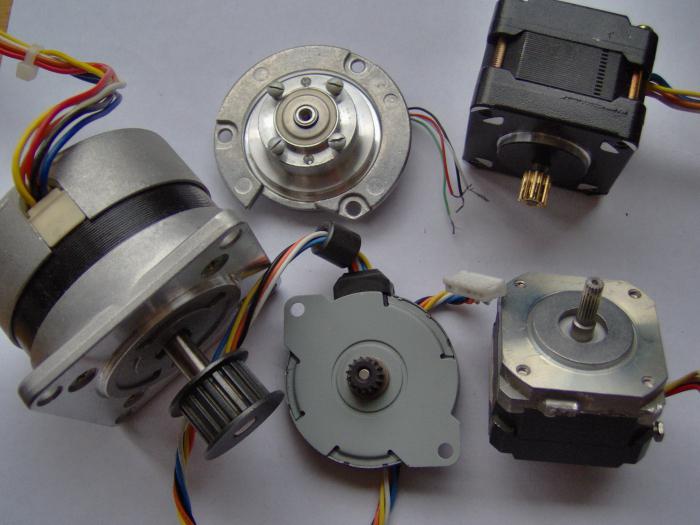
В настоящее время используются различные типы электродвигателей этой конструкции. В статье мы обсудим самые распространенные.
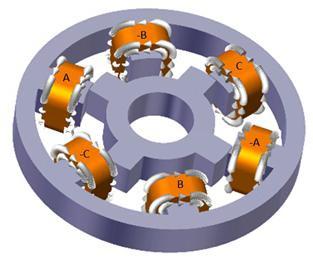
Реактивные двигатели
Именно эта разновидность приборов повсеместно используется по сей день. По сути, это почти стандартный трехфазный двигатель, на статоре которого имеется шесть зубцов. Проще говоря, каждые два зубца, противостоящие друг другу, принадлежат к одной и той же фазе. Используется последовательное или параллельное соединение их катушек.
Что касается ротора, то на нем располагается только четыре зубца. Чаще всего статор и ротор производители изготовляют из магнитомягкого материала, но нередко можно встретить просто массивные роторы из обычных металлов. Все дело в том, что к веществам, которые идут на их производство, имеется только одно важное требование: они должны обеспечивать как можно лучшую проводимость магнитного поля. Это чрезвычайно важно, если обсуждать шаговый двигатель: принцип работы напрямую связан с напряженностью магнитного поля.
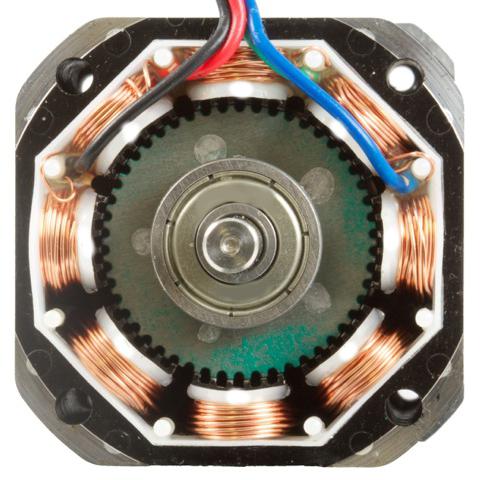
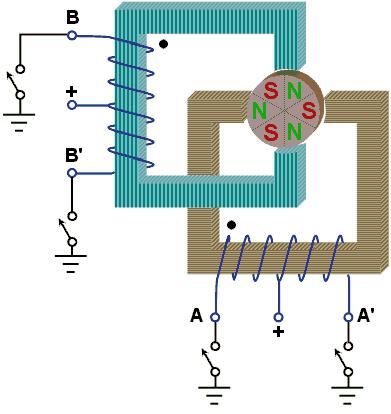
Устройства с постоянными магнитами
В качестве ротора используется магнит цилиндрической формы, на статоре же есть четыре зубца с индивидуальной обмоткой. Чтобы сильнее уменьшить угол шага, в этих моделях шаговых двигателей приходится увеличивать как количество полюсов ротора, так и число зубцов на статоре. Впрочем, следует помнить о том, что оба этих параметра имеют достаточно строгие физические ограничения. В последнем абзаце нашей статьи есть информация об альтернативной их конструкции (биполярный шаговый двигатель), но такие модели можно встретить не так часто.
Как мы уже говорили, шаговые устройства с постоянными магнитами останавливаются в строго фиксированном положении даже в тех случаях, когда убрано напряжение с обмоток. В этом случае срабатывает тот самый механизм фиксации, который мы обсудили выше, – положение фиксации.
Использование постоянных магнитов оправдано с многих точек зрения, но в то же время их применение может приводить сразу к нескольким проблемам. Во-первых, их цена далека от доступной. Кстати, сколько стоит такой шаговый двигатель? Цена моделей с постоянными магнитами превышает 100 тысяч рублей.
Во-вторых, максимальная плотность магнитного поля может быть не слишком высока, так как это значение ограничено намагниченностью самого носителя. Так, сравнительно дешевые постоянные ферритовые магниты не позволяют получить более-менее достаточной напряженности поля. А какие есть еще типы электродвигателей, работающих по этому принципу?
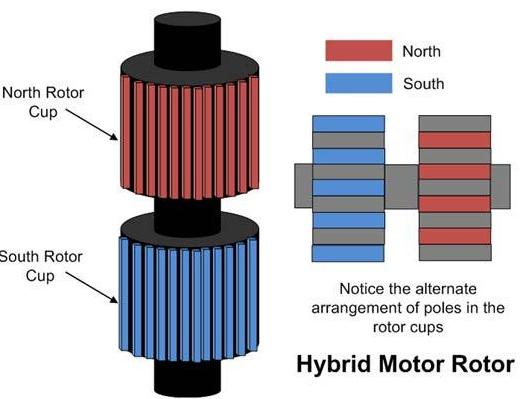
Гибридные установки
Есть и другой тип шагового двигателя, частично использующий тот же принцип. Гибридные модели работают с применением как реактивного, так и магнитного двигателей.
Ротор имеет практически ту же конструкцию, что и у реактивного ШД, но вот обмотки производятся по несколько иной схеме. Дело в том, что на каждом полюсе обмотка есть только у одной катушки (трехфазные ШД). Нетрудно догадаться, что в четырехфазных моделях намотано уже две катушки. Намотка ведется по бифилярной схеме. Особенность в том, что при возбуждении на катушках создается магнитное поле разных полярностей (биполярный шаговый двигатель).
Просмотров 792
Мы рекомендуем Вам зарегистрироваться либо войти на сайт под своим именем.
Комментарии к записи